1. นายสุวรรณ์ พลขันธ์ ปวส. 1 ช่างกลโรงงาน
2. นายนพดล จันทร์คุ้ย ปวส. 1 ช่างกลโรงงาน3. นายกิตติศักดิ์ เกตุแก้ว ปวส. 2 ช่างไฟฟ้ากำลัง
4. นายธีรวุฒิ การุญบริรักษ์ ปวส. 2 ช่างไฟฟ้ากำลัง
5. นายธเนตร แข็งเขต ปวส. 2 ช่างไฟฟ้ากำลัง
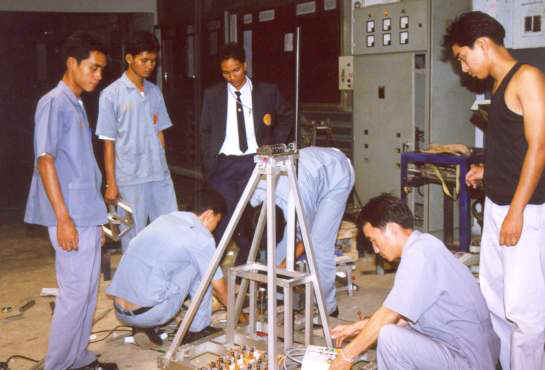
แก๊ก! ก้มๆ เงยๆ ประกอบโครงอลูมิเนียมเป็นหุ่นยนต์
อาจารย์ที่ปรึกษา
1. นายณรงค์ ดีวัน หัวหน้างานสิ่งประดิษฐ์ของคนรุ่นใหม่2. นายสุทัศน์ เพชรป้อ อาจารย์ประจำแผนก ช่างกลโรงงาน
3. นายสิทธิชัย จันทพิมพะ อาจารย์ประจำแผนก ช่างไฟฟ้ากำลัง
4. นายบุญลอ ประสารศรี อาจารย์ประจำแผนก ช่างไฟฟ้ากำลัง

อ.สุทัศน์ ควบคุมการติดตั้งมอเตอร์เกียร์และขาเตะ

การสร้างแผ่นวงจรพิมพ์

ประกอบวงจรภาคควบคุมมอเตอร์ สามารถควบคุมการกลับทางหมุนมอเตอร์ได้

ติดตั้งแบตเตอรี่แห้ง ขนาด 12 Volts, 7Ah จำนวน 2 ก้อน

สปริง หัวใจของการเตะ
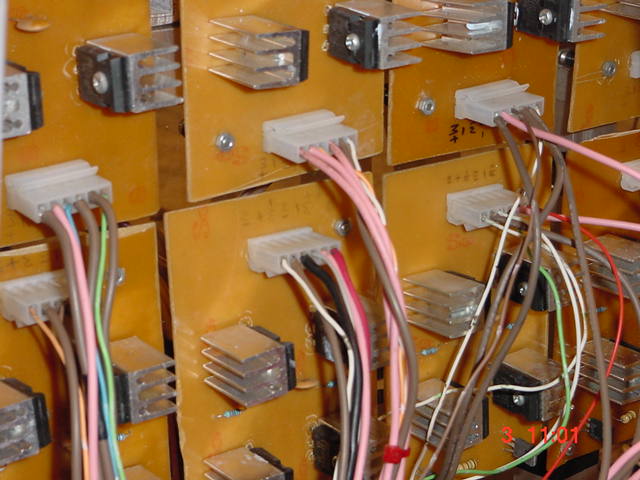
แผ่นวงจรควบคุมมอเตอร์ หนึ่งแผงต่อหนึ่งตัว

ประกอบเรียบร้อยแล้วครับ

ออกแบบให้ลูกตะกร้ออยู่กับที่ ขณะที่ขาเตะถูกมอเตอร์ ดึงไปด้านหลัง แล้วปล่อยกลับด้วยแรงสปริง

ติดตั้งกล้องวีดีโอขนาดเล็กไว้บริเวณใต้ลูกตะกร้อเพื่อมองเป้าหมาย ซึ่งมึชุดกลไกปรับระดับมุมก้ม-เงย ของทิศทางที่จะเตะออกไป

กล่องควบคุมหุ่นยนต์บังคับด้วยมือ มีทีวีเล็กสำหรับดูเป้าหมาย เชื่อมต่อสัญญาณโดยสายชีลด์ 10 เส้น
Click Here...ชมภาพพิธีเปิด บรรยากาศการแข่งขัน และรางวัลที่ได้รับ
